Technology
From algorithm alignment to physical alignment.
iEYELAB's common-path architecture lets different sensing modalities share the same optical origin, dramatically reducing registration effort and system complexity.
One optical path · three sensors
Shared optical axis
All sensing channels originate from the same viewpoint, creating natural pixel-level alignment.
Recombined sensor stack
RGB, depth, polarization and spectrum can be flexibly recombined for new applications.
Lower downstream compute
Physical alignment removes large chunks of pre-processing, freeing inference power upstream.
Expanded sensing dimensions
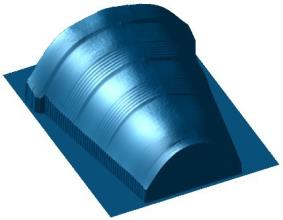
RGB
Color, texture and appearance.
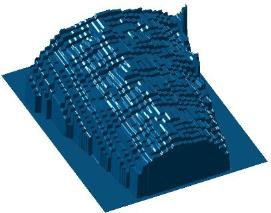
Depth
3D spatial structure and geometric distance.
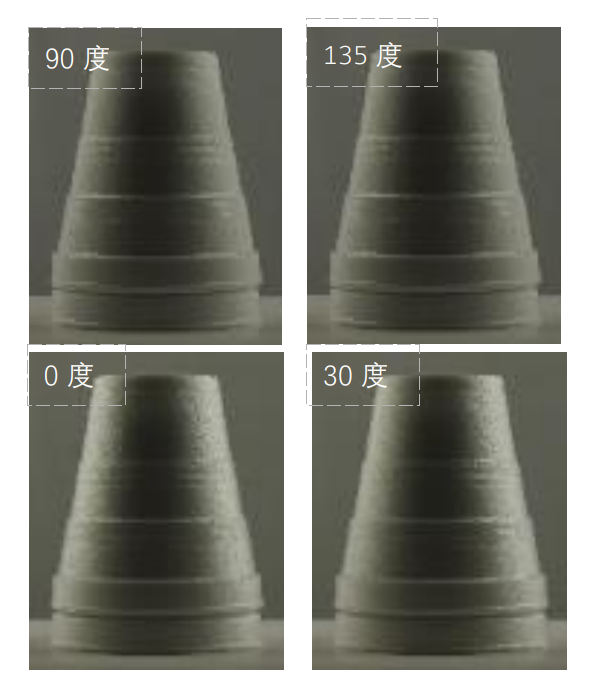
Polarization
Material surface, reflectivity and transparent object recognition.
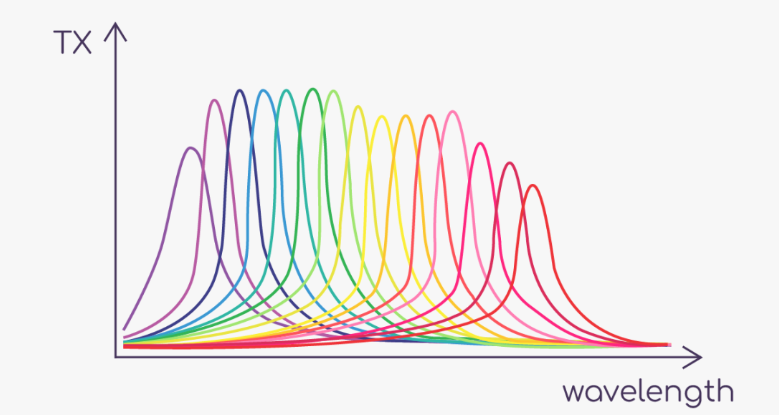
Spectrum
Material composition and wavelength signatures.
Hardware-level multi-modal algorithm stack
16-channel spectrum / iToF phase / polarization RAW parallel decoding
Early fusion on physically aligned multi-modal data
Segmentation and multimodal reasoning on top of a coherent visual base
Structured cognitive graph output for machines to act on
Why the architecture matters
IP and defensibility
3000+
Academic citations
50+
Top-tier papers
Engineering specification targets
FOV
D:90° × H:70°
Working distance
0.3m ~ 5m
ToF wavelength
940nm ± 30nm
Spectral wavelength
400 ~ 700nm
Latency
< 10 ms
Positioning precision
< 1%